#!/usr/bin/env python
# coding: utf-8
# In[30]:
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
from torch.utils.data import DataLoader
import torchvision
import torchvision.transforms as transforms
# In[31]:
import visdom
vis = visdom.Visdom()
vis.close(env="main")
# In[32]:
def value_tracker(value_plot, value, num):
'''num, loss_value, are Tensor'''
vis.line(X=num,
Y=value,
win = value_plot,
update='append'
)
# In[33]:
#device = 'cuda' if torch.cuda.is_available() else 'cpu'
device = 'cpu'
print(device)
torch.manual_seed(2020)
if device =='cuda':
torch.cuda.manual_seed_all(2020)
# In[34]:
train_data_mean = [0.5, 0.5, 0.5]
train_data_std = [0.5, 0.5, 0.5]
# In[35]:
transform_train = transforms.Compose([
transforms.RandomCrop(16, padding=4),
transforms.ToTensor(),
#transforms.Normalize(train_data_mean, train_data_std)
])
transform_test = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize(train_data_mean, train_data_std)
])
trainset = torchvision.datasets.ImageFolder(root='C:/Users/beomseokpark/Desktop/CNN/train_data_processed',
transform=transform_train)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=128,
shuffle=True, num_workers=0)
testset = torchvision.datasets.ImageFolder(root='C:/Users/beomseokpark/Desktop/CNN/test_data_processed',
transform=transform_test)
testloader = torch.utils.data.DataLoader(testset, batch_size=128,
shuffle=False, num_workers=0)
# In[36]:
import torchvision.models.resnet as resnet
# In[37]:
conv1x1=resnet.conv1x1
Bottleneck = resnet.Bottleneck
BasicBlock= resnet.BasicBlock
# In[38]:
class ResNet(nn.Module):
def __init__(self, block, layers, num_classes=1000, zero_init_residual=False):
super(ResNet, self).__init__()
self.inplanes = 16
self.conv1 = nn.Conv2d(3, 16, kernel_size=3, stride=1, padding=1,
bias=False)
self.bn1 = nn.BatchNorm2d(16)
self.relu = nn.ReLU(inplace=True)
#self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 16, layers[0], stride=1)
self.layer2 = self._make_layer(block, 32, layers[1], stride=1)
self.layer3 = self._make_layer(block, 64, layers[2], stride=2)
self.layer4 = self._make_layer(block, 128, layers[3], stride=2)
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.fc = nn.Linear(128 * block.expansion, num_classes)
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
elif isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
if zero_init_residual:
for m in self.modules():
if isinstance(m, Bottleneck):
nn.init.constant_(m.bn3.weight, 0)
elif isinstance(m, BasicBlock):
nn.init.constant_(m.bn2.weight, 0)
def _make_layer(self, block, planes, blocks, stride=1):
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
conv1x1(self.inplanes, planes * block.expansion, stride),
nn.BatchNorm2d(planes * block.expansion),
)
layers = []
layers.append(block(self.inplanes, planes, stride, downsample))
self.inplanes = planes * block.expansion
for _ in range(1, blocks):
layers.append(block(self.inplanes, planes))
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
#x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.avgpool(x)
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
# In[39]:
resnet18 = ResNet(resnet.BasicBlock, [2, 2, 2, 2], 4, True).to(device)
resnet50 = ResNet(resnet.Bottleneck, [3, 4, 6, 3], 4, True).to(device)
# In[40]:
criterion = nn.CrossEntropyLoss().to(device)
#optimizer = torch.optim.SGD(resnet50.parameters(), lr = 0.005, momentum = 0.9, weight_decay=5e-4)#default = lr 0.1
optimizer = torch.optim.Adam(resnet50.parameters(), lr=0.05)
lr_sche = optim.lr_scheduler.StepLR(optimizer, step_size=10, gamma=1)#default = gamma 0.5
# In[41]:
loss_plt = vis.line(Y=torch.Tensor(1).zero_(),opts=dict(title='loss_tracker', legend=['loss'], showlegend=True))
acc_plt = vis.line(Y=torch.Tensor(1).zero_(),opts=dict(title='Accuracy', legend=['Acc'], showlegend=True))
# In[42]:
def acc_check(net, test_set, epoch, save=1):
correct = 0
total = 0
with torch.no_grad():
for data in test_set:
images, labels = data
images = images.to(device)
labels = labels.to(device)
outputs = net(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
acc = (100 * correct / total)
print('Accuracy of the network on test images: %d %%' % acc)
if save:
torch.save(net.state_dict(), "C:/Users/beomseokpark/Desktop/CNN/model/ResNet_epoch_{}_acc_{}.pth".format(epoch, int(acc)))
return acc
# In[43]:
print(len(trainloader))
epochs = 50
for epoch in range(epochs):
running_loss = 0.0
lr_sche.step()
for i, data in enumerate(trainloader, 0):
inputs, labels = data
inputs = inputs.to(device)
labels = labels.to(device)
optimizer.zero_grad()
outputs = resnet50(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
running_loss += loss.item()
if i % 30 == 29:
value_tracker(loss_plt, torch.Tensor([running_loss/30]), torch.Tensor([i + epoch*len(trainloader) ]))
print('[%d, %5d] loss: %.3f' %
(epoch + 1, i + 1, running_loss / 30))
running_loss = 0.0
acc = acc_check(resnet50, testloader, epoch, save=1)
value_tracker(acc_plt, torch.Tensor([acc]), torch.Tensor([epoch]))
print('Finished Training')
# In[ ]:
correct = 0
total = 0
with torch.no_grad():
for data in testloader:
images, labels = data
images = images.to(device)
labels = labels.to(device)
outputs = resnet50(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('Accuracy of the network on test images: %d %%' % (
100 * correct / total))
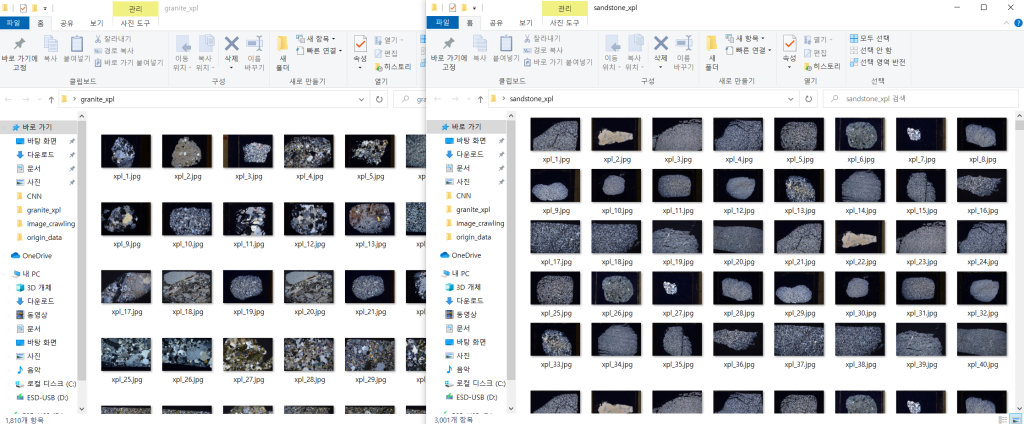
다음과 같은 암석 박편 데이터셋을 수집하여 4개의 클래스로 구별하는 코드를 ResNet으로 구현해보았는데, 정확도가 너무 나오지 않네요.
학습이 잘 되지 않는데 데이터셋이 학습시키기 어려운 것인가요?
이 정도 난이도의 데이터셋 같은 경우 어느정도의 정확도가 나와야 정상인지 궁금합니다.